The ISR Boundary Is Where 60 Points Live
A mid-level Embedded Developer interview on C/C++ firmware starts with a scenario that looks like a coding question. It is actually a systems question. The interviewer is not waiting to see ring buffer code. They are watching whether you establish the ISR-to-main-loop contract first: what the interrupt handler does, what the main loop does, and where the boundary sits. Sixty of the 100 rubric points go to two dimensions that measure exactly that judgment, and both are decided in the first 8 minutes.
This walkthrough is built on a real AI interview blueprint from InterviewStack.io, calibrated to the mid-level (2-5 years) bar for Embedded C/C++. You can browse open Embedded Developer roles while you prep. Four of the six possible follow-up turns are dramatized below, each showing the mistake pattern that costs points and the approach that earns them back.
Key Findings
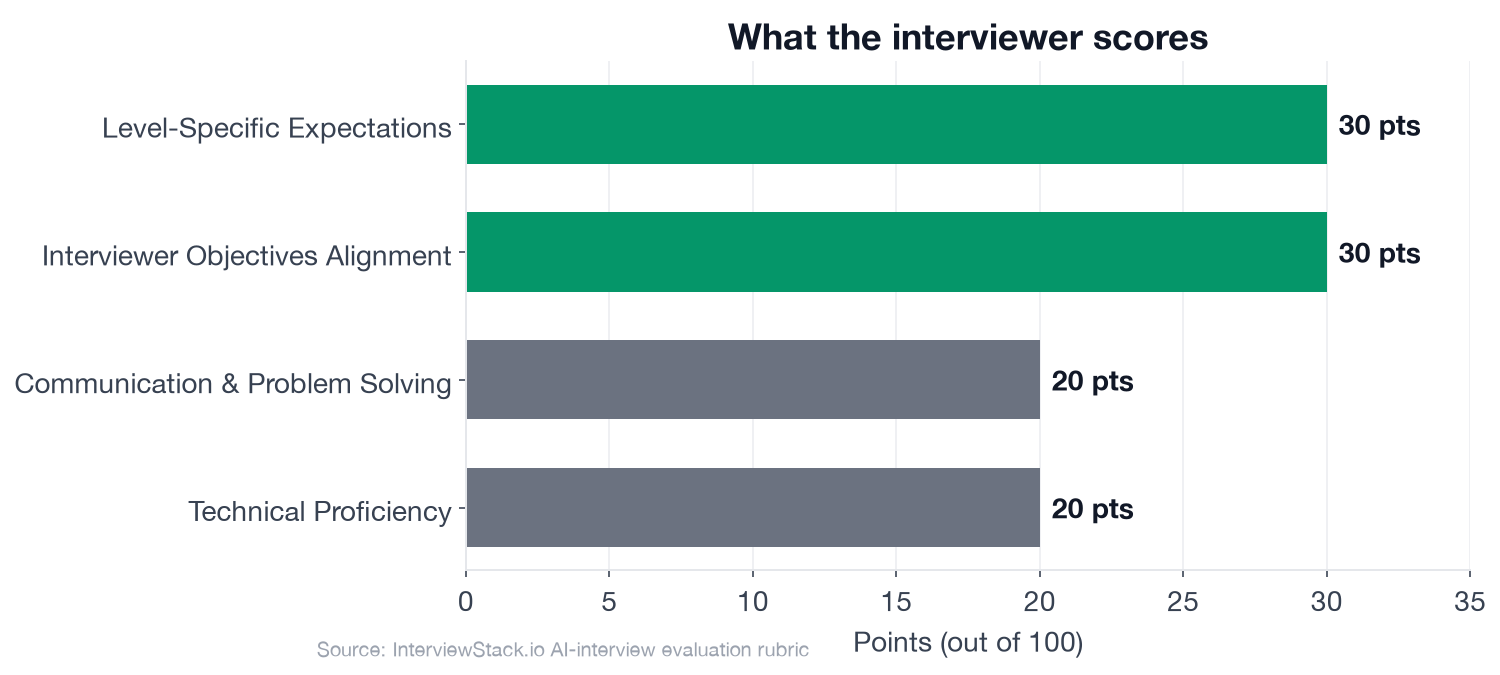
- 60 of 100 rubric points go to Interviewer Objectives Alignment (30 pts) and Level-Specific Expectations (30 pts); both hinge on the ISR architecture decision made in Phase 1.
- Phase 1 (0-8 min) holds 5 checklist items; none of them require a single line of code.
- Phase 2 (8-20 min) holds 6 checklist items; volatile correctness and explicit full-buffer handling are both scored items.
- Phase 3 (20-30 min) holds 4 checklist items covering compiler behavior, debug-vs-release failure modes, and hardware debug strategy.
- A mid-level candidate is expected to arrive at a static ring buffer independently, without prompting; needing heavy scaffolding here scores against Level-Specific Expectations (30 pts).
- Technical Proficiency covers code correctness, pointer and index arithmetic, and defensive coding patterns (20 pts); Communication covers structure, ambiguity handling, and receptiveness to hints (20 pts).
The interview question
You receive the following hardware context for a 48 MHz Cortex-M microcontroller running bare-metal firmware:
// MCU: 48 MHz Cortex-M class device, no OS // Constraints: // - 32 KB RAM total // - No dynamic allocation in production firmware // - UART RX interrupt receives bytes from an external module at up to 115200 baud // - Main loop parses newline-terminated messages and forwards valid ones to another subsystem // - Dropped bytes should be detectable // - The system must remain responsive to other periodic control tasks// Memory-mapped UART registers #define UART_SR ((volatile unsigned int)0x40004000) #define UART_DR ((volatile unsigned int)0x40004004) #define UART_RXNE (1u << 5) #define UART_ORE (1u << 3)
// Example messages: // TEMP:23\n // MODE:AUTO\n // BADMSG\n
Design and walk through an implementation for the UART receive path above, including the data flow between the interrupt handler and the main loop, and explain the key C or C++ choices you would make to keep the behavior correct and deterministic on this target.
The interviewer is probing a specific capability: designing deterministic, resource-conscious firmware for a hardware-near system without an OS to catch mistakes. That means reasoning about memory-mapped I/O access, interrupt-safe data sharing, fixed-size buffering, and defensive coding in a constrained environment.
What an Embedded Developer C/C++ Interview Actually Tests
The rubric has four dimensions. Two of them (60 points total) score judgment and architecture; two score execution. The walkthrough below covers turns 1, 3, 4, and 6 from the full follow-up sequence. Candidate name used throughout: Tomas.
Turn 1: Ring Buffer ISR Safety
Interviewer: "How would you structure the ring buffer so the ISR and main loop can share it safely without adding unnecessary latency?"
Turn 2: The volatile Question
Interviewer: "What would you mark as volatile here, and what would you intentionally not mark volatile?"
Turn 3: Debug Versus Release
Interviewer: "Suppose this works in debug but starts failing under compiler optimization. What classes of bugs would you suspect first and how would you investigate?"
Turn 4: Hardware Debug Strategy
Interviewer: "How would you test and debug this on real hardware before integrating it with the rest of the firmware?"
Seeing It on the Page Is Not the Same as Doing It Live
You know the correct answer to each turn now. The problem is that in a live 30-minute session the ISR boundary question arrives first, the volatile follow-up lands before you have finished explaining the ring buffer, and the debug-vs-release question comes when you are still sorting out whether you handled the overrun flag correctly. The pressure changes what you say. Getting the pattern right under those conditions only comes from practice against an interviewer that can adapt its follow-ups to what you actually said, not a static post.
The Embedded Developer C/C++ Interview Blueprint
The chart below maps how the 30 minutes distribute across the three phases:

This is the blueprint a strong candidate covers. It is also the exact structure the AI mock interview for Embedded Developer: Embedded C/C++ tracks you against in real time, checklist item by checklist item.
- ✓States that ISR should do minimal work, ideally read status/data and enqueue bytes
- ✓Chooses static/fixed-size storage rather than malloc/new
- ✓Proposes a clear ownership/data flow between ISR producer and main-loop consumer
- ✓Mentions message delimiting by newline and that parsing belongs outside the ISR
- ✓Recognizes need to detect UART overrun and/or software buffer overflow
- ✓Describes or writes plausible ring buffer logic with head/tail wraparound
- ✓Uses volatile appropriately for MMIO registers and discusses shared indices/state carefully
- ✓Handles full-buffer behavior explicitly, such as dropping newest/oldest data and incrementing an error counter
- ✓Mentions checking UART status flags before/while reading data and preserving error information
- ✓Accounts for malformed or overlong messages instead of assuming all input is valid
- ✓Avoids unsafe string assumptions such as requiring null termination in the raw receive buffer
- ✓Explains why heavy parsing, logging, or dynamic allocation inside ISR would harm determinism
- ✓Identifies likely causes of debug-vs-release failures such as race assumptions, undefined behavior, initialization issues, or incorrect volatile usage
- ✓Suggests concrete debug methods such as GPIO toggling for timing, UART loopback/input generation, debugger register inspection, or logic analyzer usage
- ✓For C++, names lightweight features they would allow (e.g. constexpr, enum class, small wrappers) and features they would avoid or constrain (e.g. exceptions, uncontrolled heap use, excessive virtual dispatch)
Practice This Question in the AI Mock Interview
The question bank for Embedded C/C++ at InterviewStack.io covers the topic families above for focused drilling. For the live version: the AI mock interview for Embedded Developer runs the full 30-minute blueprint, adapts its follow-ups to what you actually say, and scores you against the same four rubric dimensions shown here. The scoring weights below show where most of the score concentrates:
See the embedded systems preparation guide for company-specific interview formats and additional practice resources.
FAQ
Q. What does a mid-level Embedded Developer C/C++ interview test in 30 minutes?
The interview spans 3 phases: problem framing and architecture (0-8 min, 5 checklist items), implementation details and correctness (8-20 min, 6 checklist items), and determinism, optimization, and debugging (20-30 min, 4 checklist items). The 100-point rubric weights Interviewer Objectives Alignment and Level-Specific Expectations at 30 points each, with Technical Proficiency and Communication at 20 points each.
Q. What is the most common mistake in an Embedded Developer UART interrupt interview?
Candidates most often add too much logic inside the ISR or reach for dynamic allocation. Both violate the level-specific expectation that a mid-level candidate independently arrives at a minimal-ISR, static ring buffer design. Doing heavy work inside the ISR risks determinism and costs points across Level-Specific Expectations (30 pts) and Technical Proficiency (20 pts).
Q. What does volatile mean in embedded C and when should you not use it?
volatile tells the compiler not to cache a value between accesses, which is correct for memory-mapped I/O registers like UART_DR. It does not guarantee atomicity or memory ordering for shared data structures. Ring buffer indices shared between an ISR and main loop may need volatile to prevent stale reads, but volatile alone does not make a multi-byte read-modify-write operation interrupt-safe.
Q. How is a ring buffer shared safely between an ISR and a main loop without an OS?
In a single-core, no-OS system, the key is keeping ISR writes to a single index update: the ISR stores the byte then increments the write index; the main loop reads using the read index only. If both indices are volatile-qualified and fit in a machine word (single-word writes are typically atomic on Cortex-M), the pattern is safe without disabling interrupts. Buffer size as a power of two enables cheap modulo via bitwise AND.
Q. Why does embedded firmware sometimes pass in debug but fail under compiler optimization?
The most common causes are missing volatile qualifiers (the compiler legally eliminates reads to variables it deems unchanged), race conditions that debug-build timing happens to hide, undefined behavior that -O0 tolerates by accident, and incorrect assumptions about variable initialization. All four appear in the Phase 3 checklist items for this Embedded Developer interview.
Q. What C++ features are safe to use on a bare-metal microcontroller?
constexpr, enum class, references, namespaces, and small non-virtual wrapper classes add zero runtime overhead and improve correctness. Features to avoid or constrain on a resource-limited target: exceptions (require runtime support and heap), virtual dispatch (vtable overhead), and STL containers that use dynamic allocation. The rubric explicitly checks whether candidates name which features they would allow versus constrain.
Why the First 8 Minutes Set the Score
The ISR boundary is not a detail to be sorted out after the code is written. It is the first architectural decision the interviewer scores, and 30 points of Level-Specific Expectations depend on whether a mid-level candidate arrives there independently. Every follow-up after that is probing whether the initial architecture was sound enough to survive the next constraint. The blueprint above gives you the map. The only way to verify you can walk it under time pressure is to run the interview.
Topics
Ready to practice?
Put what you've learned into practice with AI mock interviews and structured preparation guides.